ByteDance Seed Helps Tsinghua Win RoboCup Championship
ByteDance Seed Helps Tsinghua Win RoboCup Championship
Date
2025-08-01
Category
Team News
Recently, the 2025 RoboCup Soccer Humanoid League AdultSize competition concluded in Salvador, Brazil. The Tsinghua Hephaestus team clinched the championship, powered by the HumanoidKick locomotion algorithm. This key technology was co-developed by the ByteDance Seed team and Professor Zhao Mingguo's research team at Tsinghua University. This victory marks the first time a Chinese robot soccer team has won in the AdultSize league at the RoboCup.
Challenge the Most Competitive LeagueWin the Championship of Humanoid League AdultSize
The RoboCup, first held in 1997, is one of the world's premier and most influential robotics competitions.
Organizers envision the event as a catalyst for iterating and advancing robotics technology, with an ultimate goal: enabling robots to function like human players on complex and dynamic soccer fields. This requires robots to observe with "eyes," decide with a "brain," and execute precise actions—such as passing, shooting, defending, and positioning—through locomotion control systems. The key enabling technologies include real-time perception, real-time planning, multi-agent systems, and motor control.
RoboCup features diverse leagues categorized by robot type, including Standard Platform, Small Size, Middle Size, Simulation, and Humanoid. Among these, the Humanoid League AdultSize requires competing robots to be standard adult-sized humanoids, representing the highest technical challenge.
Leveraging decentralized computing, real-time dynamic response, and hardware-algorithm co-optimization, Tsinghua Hephaestus conquered complex on-field challenges and dominated the group stage, posting decisive wins of 6-3, 16-0, and 9-0.
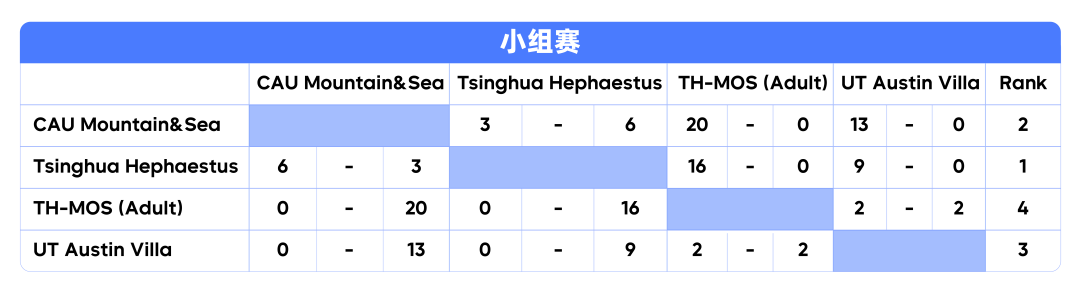
After sweeping the semi-final round 12-0, Tsinghua Hephaestus defeated the opponent 5-2 in the championship match, claiming China's first-ever title in this league.

Vision-Based End-to-End Kicking AlgorithmFrom Fragmented Skills to Holistic Strategies
A key factor in this championship victory was HumanoidKick, a vision-based, end-to-end algorithm for autonomous kicking. This algorithm was developed and validated through a collaboration between ByteDance Seed and Professor Zhao Mingguo's research team at Tsinghua University.
The HumanoidKick algorithm is specifically designed for humanoid robot hardware. It utilizes a vision-based deep reinforcement learning approach to implement a unified strategy covering the entire process of "ball finding, chasing, and kicking". This algorithm has demonstrated its effectiveness in real-world soccer games.
The HumanoidKick algorithm addresses the following core challenges in robot soccer:
From vision to action in real-time coordination: Conventional robot soccer solutions rely on manually programmed or predefined strategies, which often cause robots to experience delays in their actions and miss prime attacking opportunities when facing dynamic changes on the field. HumanoidKick employs an end-to-end deep reinforcement learning approach to establish a millisecond-level response mechanism, directly linking visual perception to robot locomotion control. This enables robots to "observe and act" simultaneously, mirroring human players.
From skill integration to autonomous decision-making: Through parallel training across thousands of environments, HumanoidKick enables robots to integrate fragmented motion skills into cohesive, end-to-end strategies. This bridges the gap between "individual actions," "on-field behavior," and "competition tactics." When faced with real-time game-state changes, the robots can autonomously decide their actions and generalize adaptive kicking skills. This evolution liberates robots from passively executing predefined action sequences, achieving a breakthrough from fragmented skills to holistic strategies.
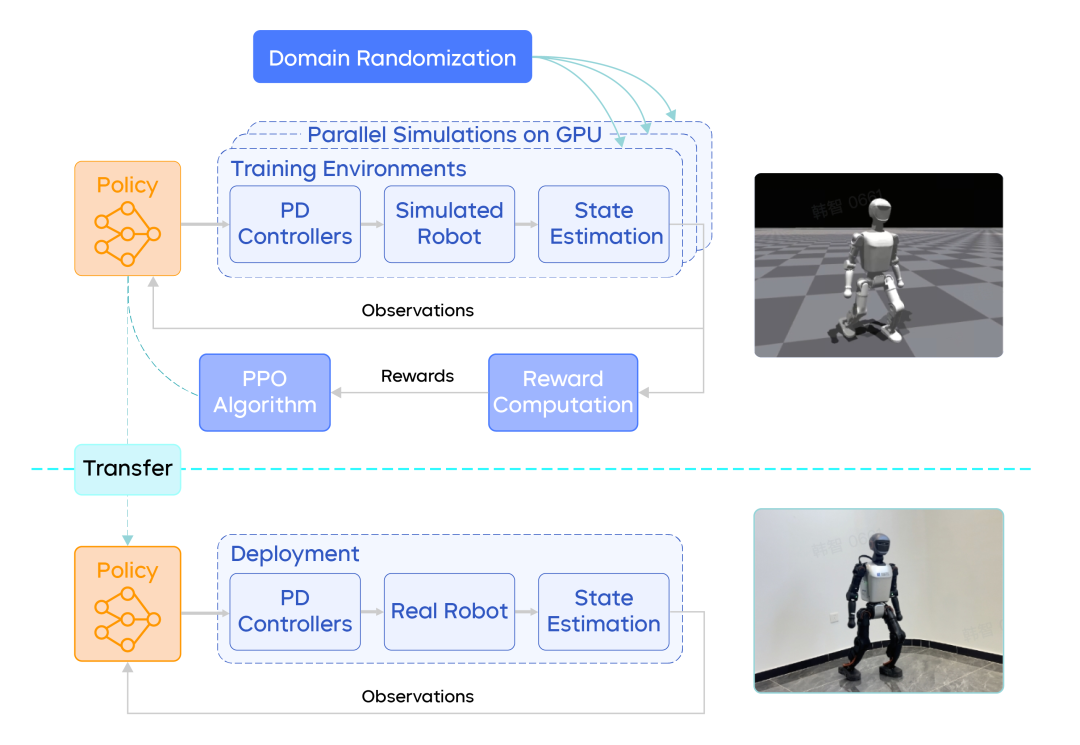
Bridging the simulation-to-reality gap: To ensure robust real-world performance of HumanoidKick, ByteDance Seed employed a training approach combining precise modeling with domain randomization. In the simulation environment, real-world perception noise and physical disturbances (such as ground conditions and joint noise) were modeled. This enables robots to "experience" various extreme real-world situations, achieving seamless transfer from simulation to real-world applications.
Trained on vast amounts of data in the simulation environment, the HumanoidKick algorithm successfully empowered robots in real-world competitions to break free from rigid, predefined action sequences. Depending on the rapidly evolving game situation, they can quickly and autonomously plan their actions. In competitions, robots powered by HumanoidKick demonstrated superior response speed, ultimately securing victory.
HumanoidKick enabled robots in blue shirts from Tsinghua Hephaestus to showcase smooth shooting skills in RoboCup matches.
Final Thoughts
The continuous evolution of the HumanoidKick algorithm is driven by the collaborative efforts of ByteDance Seed and Tsinghua University's research team. Both teams are committed to translating research achievements into practical solutions for real-world challenges, drawing on perspectives from both academic research and engineering applications.
Performance on the RoboCup soccer field marks just one small step in our technological exploration. We believe that the accumulated technical expertise will pave the way for the advancement of general-purpose robots from competitive scenarios to practical applications.
In the field of robotics, the ByteDance Seed team is dedicated to tackling challenges in developing general-purpose intelligent robots. Our focus areas include robot foundation models, intelligent perception, manipulation, and interaction, and intelligent robotic systems. Looking further ahead, we aim to develop highly intelligent robots that leverage cutting-edge algorithms and hardware to handle complex human-robot interactions.
Currently, ByteDance Seed is recruiting outstanding PhD candidates graduating in 2026 or later, including TopSeed interns and recent PhD graduates. We invite passionate technology believers to join us in pushing the boundaries of artificial intelligence through research in topics such as robotic multimodal large models for robotics, robotic reinforcement learning, and robotic data algorithms.